This website introduces a digital mirror device that was conceived and verified at a company where our CEO worked in the past, as well as new application ideas using the device. We are looking for company who can help us with future development. If you work with MEMS devices and their applications and are interested in this device, please contact us at the address at the end of this page.
〇 CONTENTS
1. What are Digital Mirror Devices?
2. Proposal of new application systems
2-2. Near eye light field displays
2-3. Light Detection and Ranging
3. The digital mirror device we are developing is called “Free MODE”
1. What are Digital Mirror Devices?
Digital Micromirror Device, generally referred to as DMD, is a MEMS device in which the individual elements are movable microscopic mirrors, arranged in large numbers on a substrate of integrated circuits. Applications include the display of images and video. Texas Instruments (TI) pioneered the development of this technology.
Texas Instruments’ DMD uses MEMS technology to form movable micromirrors on an integrated circuit made with a CMOS process.
The size of each micromirror is about 10 µm, which corresponds to one pixel in a display device, with hundreds of thousands to millions of them arranged in a lattice pattern.
To improve the aperture ratio of each pixel, a structure with a torsion bar directly below the mirror and facing the electrode on the substrate is also formed.
This three-dimensional structure is optimized to improve the aperture ratio of the mirror, but its complex structure and the need for a torsion bar limit the miniaturization of the mirror.

[How the mirror device displays images]
Each micromirror is an electrostatically driven device that can tilt its mirror surface +/-12 degrees around its torsional axis, and can be set to “ON” (+12 degrees) or “OFF” (-12 degrees) by applying voltage to the electrodes located below the mirror surface.
In the “ON” state, light from the internal light source is reflected toward the external screen and projected onto the screen, while in the “OFF” state, light is reflected toward the internal absorber and not projected onto the external screen.
Although the projection is controlled by ON and OFF binary control, gradation can be achieved by using the PWM method, which performs ON/OFF switching at high speed and expresses shading by ON time ratio (width and density). Grayscale display is possible when white light and one DMD element are used. Full color display is also possible with a single DMD element by passing the incident light through a rotating color filter to switch between RGB at high speed.
Unlike LCD and plasma displays, where each pixel can only display one of the RGB colors, full color can be displayed with a single mirror, resulting in high resolution and high contrast due to the high extinction ratio.
In addition, the high reflectance makes it brighter than LCDs.

[Applications of Digital Mirror Device]
Projector, Digital Cinema

HUD(Head Up Display)

AHS(Adaptive Highbeam System), ADB(Adaptive Driving Beam)

2. Propose new applications
The digital mirror device we are developing has new features that are difficult to implement in conventional mirror devices, such as miniaturization of mirrors, high-speed operation, and low-voltage drive, as well as a new function of multi-level output by biaxial light deflection. We propose several application ideas based on it. Currently we have not begun development of the application and it is not possible for us to complete it on our own. Please contact us if you are interested and willing to consider our proposal. Within the following three types of applications, basic patents for holographic display and LiDAR have already been granted in Japan, and a basic patent for near eye light field display has been submitted for application.
2-1. holographic display
(What is a desired holographic display?)

If the image has a viewing zone angle of about 30°, multiple people can view the 3D image together.

If an image with a pixel pitch of about 1μm is viewed as it is without magnification, an image with a viewing zone angle of 30° can be viewed and 3D vision is possible.
viewing zone angle 2Φ=2sin-1(λ/2p)

If interference fringes with a pixel pitch of 1μm are displayed on a large screen, the observer can view 3D images with a viewing zone angle of 30°.
In the desired holographic display, a 3D image with a viewing zone angle of 30° appears in front of the display screen by displaying interference fringe images formed by SLM with a pixel pitch of 1 μm without changing the size of the fringe image.
(In the proposed holographic display using Free MODE)
Images visible on a holographic display
Configuration of the system
Features of the System


: The proposed holographic display is characterized by the fact that the size of the image wavefront produced by the SLM is not changed until it is displayed on the display. This results in a viewing zone angle that is maintained up to the aerial image.
: It is important not to change the viewing zone angle through 1) SLM(Free MODE) surface, 2) 2-axis scanner surface, 3) display surface, 4) aerial image.
1)SLM with 1μm pixels –> Wavefront generation with a viewing zone angle of 30° –> Time-division in parallel (2D scanning in X-Y direction) –> Display of 3D images on a large screen
2)SLM with 1μm pixels, high-speed light deflection and high-speed device switching is required
3)Free MODE is possible
(Features of the optical system)

(Required SLM performance) Free mode is the best way to achieve this specification on a mirror device
Display Device Specifications
Frame rate: 60Hz
Display area: 15 inches diagonal
SLM area: 1mm square
Element area: 1μm square (viewing zone angle: approx. 30°)
Number of elements per chip: 1 million
Active matrix drive
Display time for One element
Display area: 72900mm2
Mirror chip area: 1mm2
Frame rate: 60Hz
Chips are arranged in time series on the display without changing their size (72.9 billion elements)
Display time per chip (each element): 229 nsec
Time to supply voltage to each element in active matrix drive
Number of elements driven in parallel on a chip: 200
Voltage supply time for each element when driving 5000 elements in time sequence during 229 nsec: 46 psec (=229 nsec/5000)
2-2. Near Eye Light Field Display
(What is the desired near eye light field display?)
< Conventional viewing 3D images with HMDs >
3D images in conventional HMDs only provide depth perception
through binocular disparity

< Problems with conventional HMDs >
3D images in conventional HMDs do not allow depth perception
through monocular focus adjustment..
–> Insufficient adjustment and difficulty with natural 3D recognition
< Measures being considered for the above problems >
Measures generally considered include light field technology (super multi-view display technology) to achieve depth perception through monocular focus adjustment
–> Display of images in different focal positions within a monocular
–> For example
1) Multiple point light sources at different positions are turned on sequentially over time to change the focal position and guide the light to a monocular
2) Changing the focal position by moving the lens back and forth to guide to the monocular
3) Changing the focal position by both back and forth of the lens and selective lighting of multiple light sources to guide to a monocular.
4) One DMD determines the image and another DMD changes the focus to guide the monocular
The currently desired near eye light field display displays multiple images with different focal positions on the eye in time sequence.
(Proposed near eye light field display using Free MODE)

The proposed near-eye light field display uses one light source, one SLM and a non-movable lens to display different focal points to the eyeball, instead of the conventional multiple light sources, multiple SLMs and movable lenses.
Light from one light source is injected into a Free MODE that allows light deflection in two axes and four directions, three images a to c by light in three different directions, each of which is combined through different positions of one lens to form images at different focus a to c in the eyeball.
Thus, a near-eye light field display is provided that does not cause fatigue from use.
(Important points of this system configuration)

: Three images with different focus positions are displayed sequentially in time
: Each image is imaged at a different depth in the eyeball using different parts of a single lens
: One direction is absorbed by the light absorption plate in the OFF direction

: Three focus images to achieve depth perception through monocular focus adjustment

: Achieve natural 3D recognition by focusing and perceiving images of different depths
(A scene from the practical application of this system)

(Features of this system)
: Available in conventional eye tracking and glasses type
: Displays up to 3 focal images on the eyeball
: Also possible with HMD type
: Achieve depth perception through monocular focus adjustment
: Eliminates fatigue during use
2-3. LIDAR(Light/Laser imaging Detection And Ranging)
< Problem of LiDAR >

< Concept of the System >
LiDAR requires ranging up to 300m away. A Class 1 laser source is optimal for this purpose.
–> InGaAsP/InP as 1550nm laser, InGaAs as detection
–> More expensive than silicon detection, making high integration difficult
–> Switching the input/output position within each group of detection elements using Free MODE makes the detection system inexpensive and high-definition.
< Benefit of integrating Free MODE into LIDAR >
Enables high-definition detection of long distance detection

(Example of this system configuration)

Laser wavelength: 1550nm InGaAsP/InP 1 laser
Measurement range: 300m
Frame rate: 10Hz
Detection: InGaAs PDA (parallel detection) + passive matrix driven Free MODE 2D array
Measurement range: 60° horizontal, 16° vertical
Scanning system: None
Measuring principle: FMCW
(How to select distance measurement elements)

3. Digital mirror device we are developing : Free MODE

: Free MODE is an abbreviation for Free Mirror device for Optical DEflection.
: This device was conceived and tested at a company I worked for in the past, and all the results shown on this website are the results of the development at that time.
: Unlike conventional digital mirror devices, this mirror device has no fixed parts such as torsion beams or cantilever beams.
: Possible to deflect light without restorative force depending on the tilt of the mirror.
: The device is not yet completed. Development is ongoing at our company.
: The following are the results of the development of this device.
: The above application is intended to use this device.
: If you are interested in helping us develop this device, please contact us by e-mail.
3-1. Device Features and Benefits
( Features )
This device is a mirror device characterized by changing the tilt direction of a mirror that is not fixed at all, unlike the torsion bar method or cantilever method.
( Benefits )
The advantage of this device is due to the fact that the mirror is not fixed.
One flat mirror

Design any mirror size
High speed light deflection
Low voltage drive with electrostatic drive
Inclined by low force like a balance around a fulcrum

( Two types of device configurations )

Post/stopper placed around mirror. Square mirrors available.

The post/stopper is placed coaxially with the Pivot. Reaction force due to contact between the mirror and the post is smaller than that of the corner stopper type.
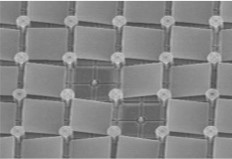
( SEM photograph of 10μm mirror )

High speed response and low residual vibration by forming the mirror with thin, lightweight, and hard film.
Posts and stoppers are also formed three-dimensionally.
( Two different drive systems for moving non-fixed mirrors )
(a) floating potential method

The mirror is given a floating potential (almost zero potential) by the electric field of the counter electrode.
The mirror tilting direction is controlled by electrostatic attraction due to the potential difference between the counter electrode and the mirror.
--> Light deflection in two axes is possible
Mirror potential: about 0 (V)
(b) contact bias method

Electric potential is applied by contact between the pivot and the mirror.
Mirror tilting direction is controlled by electrostatic attraction due to the potential difference between the counter electrode and the mirror (lower voltage drive is possible than floating potential drive).
--> Light deflection in two axes is possible
If the mirror is in contact with the pivot
Mirror=C=0 (V)
If the mirror is away from the pivot
Mirror≒V/2 (V)、C=0 (V)
--> Mirror is attracted to electrode and contacts pivot
( Response performance of mirror )
Evaluated the response of mirrors with sizes from 5 to 20 μm.Fast response and short residual vibration were confirmed for each mirror size.
Example of response performance measurement of 8μm mirror

Response performance of simultaneously fabricated 5μm and 8μm mirrors

Calculation of device response performance
Model for calculating mirror response performance

Formula for calculating mirror response performance

Model Predicted “Mirror Size vs. Response Time”

Improved response due to miniaturization of unfixed mirrors
( Device operation video )

Simultaneous drive of all elements by passive matrix drive
20μm□、1Hz、±3.4deg、40V
All elements displayed in black and white
8μm□、10kHz、±7.5deg、30V
All elements displayed in gray
5μm□、10kHz、±12deg、30V
Many elements are malfunctioning
20μm□、1Hz、±8deg
No shading plate, so no black and white display, biaxial light deflection over time
( Low voltage drive is confirmed )
1Hz operation is correct with black and white display. 10kHz operation is correct with gray display between black and white.

10μm mirror
±12° tilt
ON/OFF operation
Drive voltage Square wave 5V
1Hz operation
The configuration was changed to prevent contact charging during mirror light deflection operation, and the world's first device that can operate normally at 5 V was confirmed.



The above is an introduction to the digital mirror device we are developing and proposed applications utilizing its functions. If you are interested in commercializing this device or the proposed application, please contact us at the address below.
If you would like to share this website, please click the button below.