本ホームページは、弊社代表が以前勤めていた会社で発案し機能を検証したデジタルミラーデバイスとそれを用いた新しいアプリケーション案を紹介するサイトです。これからの開発に協力していただける方を求めています。MEMSデバイスや該当アプリケーションを開発されている方で、本デバイスに興味がある方がいらっしゃいましたら最後尾の連絡先までご連絡下さい
〇目次
3.弊社が開発しているデジタルミラーデバイス フリーモード とは
1.デジタルミラーデバイスとは
一般的にDMD(Digital Micromirror Device)と呼ばれるデバイスであり、可動式の微小な鏡を、集積回路の基板の上に多数配列したMEMSデバイスである。応用先としては、画像や映像の表示に用いられる。テキサス・インスツルメンツ (Texas Instruments、TI) によって開発されたものが先駆けである。
テキサス・インスツルメンツのDMDは、CMOSプロセスで作られた集積回路上にMEMS技術で可動式のマイクロミラーを形成している。各マイクロミラーのサイズは10μm前後であり、これが表示素子における1画素に相当し、数十万から数百万個が格子状に配列している。各画素の開口率を向上させるために、ミラー直下にトーション・バーを有し基板上の電極に対面する構造も形成されている。この立体的な構造はミラーの開口率を向上させるため最適化された構成であるが、複雑な構造であることとトーション・バーが必要であるためにミラーの微細化に限界がある。

【ミラーデバイスが画像表示するには】【】【】【】
各マイクロミラーは静電駆動型デバイスであり、鏡面をねじれ軸周りに+/-12度傾斜させることができ、鏡面下部に設けた電極を駆動し「ON」(+12度)と「OFF」(-12度)の二つの状態と出来る。
「ON」では内部光源からの光を外部のスクリーン方向に反射しスクリーンにて投影され、「OFF」では光を内部の吸収体方向に反射し外部には投射されない。各ミラーを個別に駆動することにより表示画素ごとに光の投射を制御でき、これにより画像が表示される。
投射はONとOFFの2値制御であるが、ON/OFF切替えを高速で行い、ONの時間比率(幅、密度)で濃淡を表現するPWM方式を用いることで階調表現が可能である。白色光と1個のDMD素子を用いるとモノクローム(グレイスケール)表示ができる。また、入射光を回転式のカラーフィルタを通過させてRGBをフレーム周波数より高速で切り替えることにより1個のDMD素子でフルカラー表示が可能である。
各画素がRGBのいずれかしか表現できない液晶ディスプレイやプラズマディスプレイと異なり、一つのミラーでフルカラーを表現できるので高精細であり、消光比も大きいためコントラストを大きく出来る。さらに、反射率が高いので液晶に比べて明るい。

【デジタルミラーデバイスの応用例】
プロジェクター、デジタルシネマ

HUD(Head Up Display)

AHS(Adaptive Highbeam System)、ADB(Adaptive Driving Beam)

2.新しいアプリケーションの提案
弊社で開発しているデジタルミラーデバイスは、ミラーの小型化や高速動作及び低電圧駆動に関し、従来のミラーデバイスでは実施が困難な新しい性能を有し、さらに2軸光偏向による多値出力という新しい機能を有している。それを基にしたアプリケーション案を考案した。現在、アプリケーションに関しては未着手であり自社のみでは実施不可なので、興味があり検討してみたいという方はご連絡下さい。なお、以下の3種類のアプリケーションの内、ホログラフィックディスプレイと車載LiDARに関しては基本特許を取得済であり、ライトフィールド・ニアアイ・ディスプレイの基本特許は出願済である。
2-1.ホログラフィックディスプレイ
(望まれるホログラフィックディスプレイとは)

30°程度の視域角がある映像であれば、複数の人が一緒に立体映像を見ることが出来る

画素ピッチ1μm程度の映像を拡大無しにそのまま見れば、視域角30°の映像をみることが出来、立体視できる
視域角2Φ=2sin-1(λ/2p)

大きな画面上に1μm画素ピッチの干渉縞を表示すれば、視域角30°の映像をみることが出来、立体視できる
望まれるホログラフィックディスプレイでは、1μm画素ピッチのSLMによる形成された干渉縞映像を大きさを変えずに表示することにより、画面前面に視域角30°の立体映像が浮かび上がる
(提案する本デバイスを用いたホログラフィックディスプレイでは)

システムイメージ

システム構成
- 提案するホログラフィックディスプレイの特徴は、SLMで作製された映像波面の大きさをディスプレイでの表示においてまで変えないことにある。それにより視域角が空中映像まで維持される
- SLMであるフリーモード表面→2軸スキャナー表面→ディスプレイ表面→空中映像
を通して、視域角を変えないことが重要
システムの特徴
・1μm画素のSLM → 視域角30°の波面作製 → 時分割並列方式(X-Y方向に2次元走査)で表示 → 大画面にて立体映像が表示
・1μm画素であり、高速な光偏向と高速な素子切り換えが可能なSLMが必要
→ フリーモードでは可能
(光学系の特徴)

(必要なSLMの性能) この仕様をミラーデバイスで達成するにはフリーモードが最適
〇本システムの表示デバイスの仕様
・フレームレート:60Hz
・ディスプレイ面積:対角15インチ
・SLM面積:1mm□
・素子面積:1μm□(視域角約30°)
・1チップ内の素子数:100万個
・アクティブマトリクス駆動
〇1素子の表示時間
・表示面積:72900mm2
・ミラーチップ面積:1mm2
・フレームレート:60Hz
・ディスプレイ上にチップの大きさを変えずに時系列配置(729億素子)
・1チップ1箇所(各素子)の表示時間:229nsec
〇アクティブマトリクス駆動の各素子電圧印加時間
・1チップの並列駆動数:200
・229nsecの間に5000素子を時間順次に駆動
・各素子 の電圧印加時間 229nsec/5000=46psec
2-2.ライトフィールド・ニアアイ・ディスプレイ
(望まれるライトフィールド・ニアアイ・ディスプレイとは)
< 従来のHMDによる立体視 >
従来のHMDでの立体視は、両眼視差による奥行き知覚を獲得するのみ

< 従来のHMDにおける問題点 >
従来のHMDでの立体視は、単眼のピント調節による奥行き知覚が出来ない
⇩
調節が不十分となり、自然な立体認識が困難
< 上記問題点に対して検討されている対策は >
一般に検討されている対策としては、ライトフィールド技術(超多眼表示技術)により、単眼のピント調節による奥行き知覚を達成
⇩
単眼内に、異なる焦点位置での画像表示
⇩
例えば、
・複数の異なる位置の点光源を時間順次に点灯し焦点位置を変えて、単眼に導く
・レンズを前後させて焦点位置を変えて、単眼に導く
・レンズの前後と複数光源の選択点灯の両方で焦点位置を変えて、単眼に導く
・1個のDMDで映像を決定し、もう1個のDMDで焦点を変えて、単眼に導く
現在望まれているライトフィールド・ニアアイ・ディスプレイでは、眼球に異なる焦点位置を有する画像を時間順次に複数表示する
(提案する本デバイスを用いたライトフィールド・ニアアイ・ディスプレイとは)

提案するライトフィールド・ニアアイ・ディスプレイは、従来の複数の光源や複数のSLMや可動式レンズを用いるのでは無く、1個の光源と1個のSLMと非可動のレンズを用いて眼球に異なる焦点位置を表示させることにある
1個の光源からの光を2軸4方向へ光偏向が可能なフリーモードに入射させ、3方向への光による3個の画像a~cを異なる方向に導き、それぞれを1個のレンズの異なる位置を経て合成し、眼球内の異なる焦点a~cに結像させる
それにより、使用による疲労を生じないライトフィールド・ニアアイ・ディスプレイを提供する
(本システムの構成ポイント)

・異なる焦点位置を有する3個の画像を時間順次に表示
・個々の画像は1個のレンズのそれぞれの箇所を用いて、眼球内の異なる奥行に結像
・1方向はOFF方向で吸光板に吸収

・3個の焦点画像により、単眼のピント調節による奥行き知覚を獲得

・異なる奥行きの画像を合焦し知覚
・自然な立体認識を獲得
(本システムの製品イメージ)

(本システムの特徴)
- 従来のアイトラッキング式とメガネ式にて展開
- 眼球に最大3焦点の画像を表示
- HMD式でも可
- 単眼のピント調節による奥行き知覚を獲得
- 着用における疲労を解消
2-3.車載LIDAR(Light/Laser imaging Detection And Ranging)
<車載LiDARの課題>

<システムのコンセプト>
車載LiDARには300m先までの測距が必要。そのためにクラス1のレーザー光源
→ 1550nmのレーザーとしてInGaAsP/InP、検出としてInGaAs
→ シリコン系検出に比べて大幅に高価なので、高集積化が困難
→ フリーモードで各検出素子内の入出力位置を切り替え、検出系を安価に高精細とする
<フリーモードを車載LIDARに組み込むと>
遠方の検出の高精細な検出が可能になる

(本システムの構成例)

レーザー波長:1550nm InGaAsP/InP 1レーザー
測定範囲:300m
フレームレート:10Hz
検出:InGaAs PDA(並列検出)+ パッシブマトリクス駆動フリーモード2次元アレー
計測範囲:水平60度、垂直16度
走査系:無し
計測原理:FMCW
(測距素子の選択方法)

3.弊社が開発しているデジタルミラーデバイス フリーモード とは

・フリーモードはFree Mirror device for Optical DEflectionの略称
・過去に勤めていた会社で発案、動作検証したデバイスであり、ホームページに記載の結果は全て当時の開発結果である
・従来のデジタルミラーデバイスと異なり、捩じり梁や片持ち梁等の固定部を有しない、新しい構成のミラーデバイス
・ミラーの傾斜に応じた復元力を持たない光偏向が可能
・デバイスは未完成。弊社にて開発を継続中
・以下に、このデバイスの開発結果を紹介する
・上記のアプリケーションは本デバイスを使用することを想定している
・このデバイスの開発に協力いただける方は、メールにてご連絡下さい
【デバイスの特徴と利点】
〇特徴
このデバイスはトーションバー方式や片持ち梁方式と異なり、全く固定されていないミラーなミラーの傾斜方向を変えることを特徴とするミラーデバイスである
〇利点
このデバイスの利点はミラーが固定されていないことに起因する
・1枚の平板ミラー

・ミラーサイズを自由に設計
・高速な光偏向
・静電駆動にて低電圧駆動
・支点を中心に天秤のように弱い力で傾斜

【2種類のデバイス構成】

ミラー周辺にポスト/ストッパを配置。四角形ミラーが使用可

支点(Pivot)と同軸上にポスト/ストッパを配置。ミラーとポストの接触による反力がコーナーストッパ型に比べ小さい
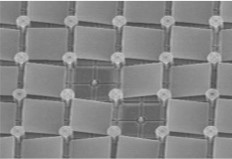
【10μmミラーのSEM写真】

ミラーを薄板/軽量/硬い膜で形成することで、高速応答が可となり残留振動も少ない
ポストやストッパも立体的に形成
【固定されていないミラーを動かすための2種類の駆動方式】
(a) フローティングポテンシャル方式

・対向電極の電場により、ミラーにフローティングポテンシャル(ほぼゼロ電位)を付与
・対向電極とミラーの電位差による静電引力によりミラーの傾斜を制御
⇩
・2軸での光偏向が可能
・ミラー電位:~0(V)
(b) コンタクトバイアス方式

・ピボットとミラーの接触による電位の付与
・対向電極とミラーの電位差による静電引力によりミラーの傾斜を制御(フローティングポテンシャル駆動に比べて低電圧での駆動が可能)
・2軸での光偏向も可能
⇩
・ミラーがピボットと接触していると Mirror=C=0 (V)
・ミラーがピボットから離れていると Mirror≒V/2 (V)、C=0 (V) → ミラーが電極に引き寄せられピボットに接触
【ミラーの応答性能】
〇5~20μmの大きさのミラーの応答性を評価。各ミラーサイズともに高速な応答性及び短い残留振動を確認
8μmミラー応答性能の実測例

同時に作製した5μmミラーと8μmミラーの応答性能

〇デバイスの応答性能の予測
ミラー応答性能の算出モデル

ミラー応答性能の算出式

モデルから予測される「ミラーサイズvs応答時間」

フリーなミラーなので、微細化により応答性は向上
【デバイス動作の動画像】

パッシブマトリクス駆動による全素子同時駆動
20μm□、1Hz、±3.4deg、40V
全素子白黒表示
8μm□、10kHz、±7.5deg、30V
全素子灰色表示
5μm□、10kHz、±12deg、30V
未完のため動作不良素子有り
20μm□、1Hz、±8deg
遮光板無しなので白黒表示では無く、経時で2軸光偏向を実施
【低電圧駆動を確認】
1Hz評価は白黒表示で正常動作。10kHz評価は白黒の中間の灰色表示で正常動作

・10μmミラー
・±12°傾斜
・ON/OFF動作
・駆動電圧 矩形波 5V
・1Hz
ミラー光偏向動作時に接触帯電が発生しないように構成を変更し、初めて5Vで正常動作する素子を確認



以上が、弊社にて開発しているデジタルミラーデバイスとその機能を活用したアプリケーション案の紹介です。このデバイスや提案するアプリケーションの事業化に興味がある方は下記連絡先までご連絡下さい。
本ホームページをシェアしていただける方は、下記ボタンからよろしくお願いします。